|
I am a PhD student in Computer Science at the National University of Singapore (NUS), supervised by Prof. Gim Hee Lee and under the Industrial PhD Programme with Garena and Sea AI Lab. My work focuses on creating high-quality 3D digital worlds and embodied agents that interact within them. I obtained my Master’s degree in Robotics from ETH Zurich, and Bachelor’s degree in Mechanical Engineering from Nanyang Technological University. Email | GitHub | Google Scholar | OpenReview | LinkedIn |
|
|
|
|
|
Stefan Lionar, Gim Hee Lee Computer Vision and Pattern Recognition (CVPR), 2026 Paper / Project Page / Code A novel framework for scalable cooperative human-object interaction. |

|
Stefan Lionar, Jiabin Liang, Gim Hee Lee Computer Vision and Pattern Recognition (CVPR), 2025 Paper / Code  /
Demo
/
Video
/
Demo
/
Video
An autoregressive artistic mesh generation method that retrieves the next token from a dynamically growing tree structure. It achieves a state-of-the-art compression rate. |
|
Stefan Lionar, Xiangyu Xu✉, Min Lin, Gim Hee Lee Neural Information Processing Systems (NeurIPS), 2023 (✉ Corresponding author) Paper / Project Page / Code / Video An efficient architecture and representation for single-view 3D reconstruction. |
|
|
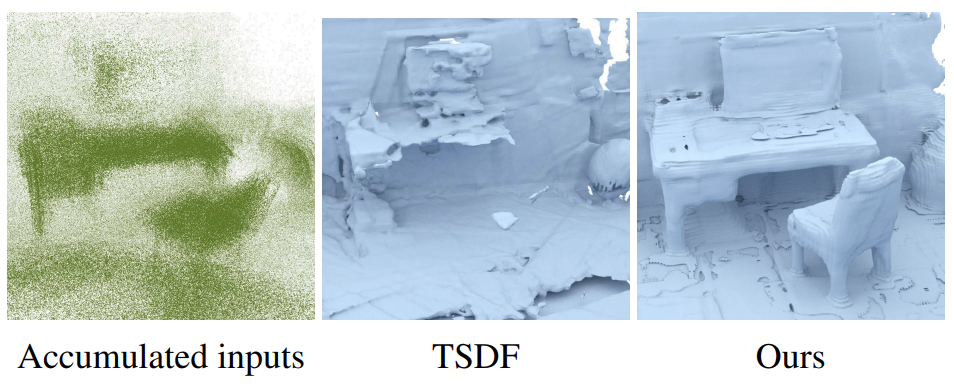
Stefan Lionar*, Lukas Schmid*, Cesar Cadena, Roland Siegwart, Andrei Cramariuc International Conference on 3D Vision (3DV), 2021 (*Equal contribution) Paper / Code 
A robust incremental volumetric mapping framework using neural representation. |
|
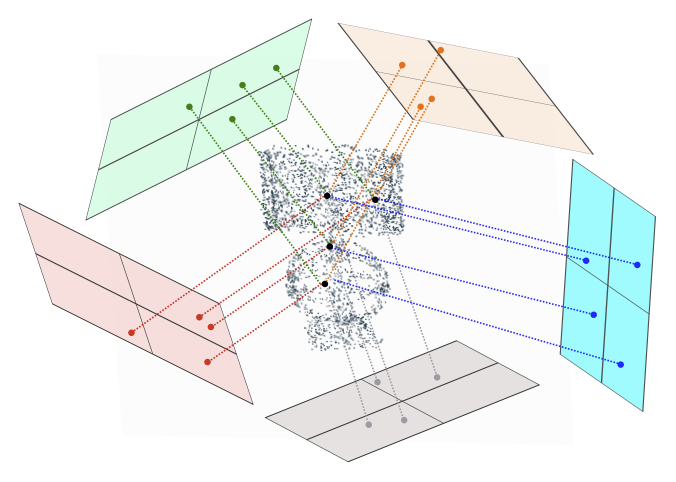
Stefan Lionar*, Daniil Emtsev*, Dusan Svilarkovic*, Songyou Peng Winter Conference on Applications of Computer Vision (WACV), 2021 (*Equal contribution) Paper / Code / Video We propose implicit representation using multiple 2D planes for accurate 3D surface reconstruction from point cloud. |
|
|
|
BioMind 2022 |
|
|
Maximilian Stölzle, Stefan Lionar Duckietown class at ETH Zurich, 2019 Explore various data augmentation, design safety-oriented loss function, and integrate Google Coral Edge TPU for real-time inference. |
|
Website template is taken from here |